Anturi yleisessä mielessä on laite, joka muuntaa fyysisen suuren toiseksi, mikä on kätevä prosessointia, lähetystä tai myöhempää muuntamista varten. Pääsääntöisesti ensimmäinen suure on fyysinen, eikä sitä voida suoraan mitata (lämpötila, nopeus, siirtymä jne.), ja toinen on sähköinen tai optinen signaali. Kapea mittauslaitteiden alalla on anturit, joiden pääelementti on kela.
Sisältö
Miten induktanssianturi toimii ja miten se toimii
Toimintaperiaatteen mukaan induktiiviset anturit ovat aktiivisia, eli ne vaativat ulkoisen generaattorin toimiakseen. Se antaa signaalin tietyllä taajuudella ja amplitudilla kelaan.
Kelan kierrosten läpi kulkeva virta muodostaa magneettikentän. Jos johtava esine tulee magneettikenttään, kelan parametrit muuttuvat.On vain korjattava tämä muutos.
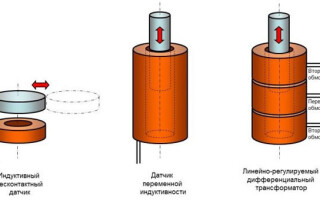
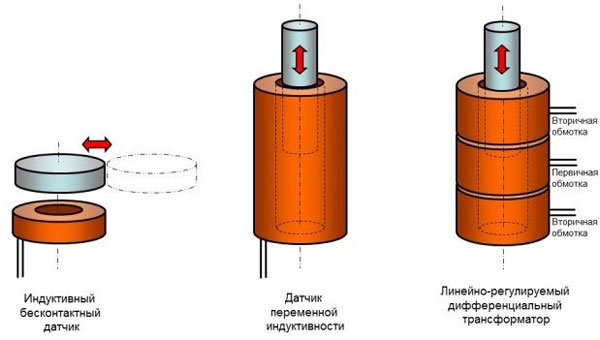
Yksinkertaiset kosketuksettomat anturit reagoivat metalliesineiden ilmestymiseen käämin lähialueelle. Tämä muuttaa kelan impedanssia, tämä muutos on muutettava sähköiseksi signaaliksi, vahvistettava ja (tai) kynnyksen läpikulku vertailupiirin avulla.
Toisen tyyppiset anturit reagoivat käämin ytimenä toimivan kohteen pituussuuntaisen sijainnin muutoksiin. Kun kohteen sijainti muuttuu, se liikkuu kelassa sisään tai ulos ja muuttaa siten induktanssiaan. Tämä muutos voidaan muuntaa sähköiseksi signaaliksi ja mitata. Toinen tällaisen anturin versio on, kun esine lähestyy kelaa ulkopuolelta. Tämä aiheuttaa induktanssin pienenemisen maailmiön vuoksi.
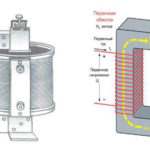
Toinen versio induktiivisesta siirtymäanturista on lineaarisesti säädettävä differentiaalimuuntaja (LVDT). Se on komposiittikela, joka on valmistettu seuraavassa järjestyksessä:
- toisiokäämi 1;
- ensisijainen käämitys;
- toisiokäämi 2.
Generaattorin signaali syötetään ensiökäämiin. Keskikäämin luoma magneettikenttä indusoi EMF:n jokaisessa toissijaisessa (muuntajan periaate). Ydin, kun se liikkuu, muuttaa keskinäistä yhteyttä kelojen välillä, mikä muuttaa sähkömotorista voimaa kussakin käämissä. Tämä muutos voidaan korjata mittauspiirillä. Koska sydämen pituus on pienempi kuin komposiittikelan kokonaispituus, kohteen sijainti voidaan määrittää yksiselitteisesti toisiokäämien EMF-suhteella.
Samalla periaatteella - käämien välisen induktiivisen kytkennän muutos - rakennetaan käännösanturi.Se koostuu kahdesta koaksiaalikelasta. Signaali syötetään yhteen käämeistä, toisessa EMF riippuu keskinäisestä kiertokulmasta.
Toimintaperiaatteesta on selvää, että induktiiviset anturit ovat rakenteesta riippumatta kosketuksettomat. Ne toimivat etäältä eivätkä vaadi suoraa kosketusta ohjattavaan kohteeseen.
Induktiivisten antureiden edut ja haitat
Induktiivisen tyyppisten antureiden etuja ovat ensisijaisesti:
- suunnittelun luotettavuus;
- kontaktiyhteyksien puute;
- korkea lähtöteho, joka vähentää kohinan vaikutusta ja yksinkertaistaa ohjauspiiriä;
- yliherkkyys;
- kyky työskennellä teollisen taajuuden vaihtojännitteen lähteistä.
Induktiivisen tyyppisten antureiden suurin haittapuoli on niiden koko, paino ja valmistuksen monimutkaisuus. Käämikelat, joilla on annetut parametrit, vaativat erikoislaitteita. Miinuksena pidetään myös tarvetta ylläpitää tarkasti pääoskillaattorin signaalin amplitudi. Kun se muuttuu, myös herkkyysalue muuttuu. Koska anturit toimivat vain vaihtovirralla, amplitudin ylläpitämisestä tulee tietty tekninen ongelma. Suoraan (tai muuntajan kautta) anturia ei voi liittää kotitalous- tai teollisuusverkkoon - siinä amplitudin tai taajuuden jännitteen vaihtelut voivat nousta jopa 10 %:iin normaalitilassa, mikä tekee mittaustarkkuudesta mahdoton hyväksyä. .
Lisäksi mittaustarkkuuteen voivat vaikuttaa:
- kolmannen osapuolen magneettikentät (anturin suojaus on mahdotonta sen toimintaperiaatteen perusteella);
- kolmannen osapuolen EMF-anturit syöttö- ja mittauskaapeleissa;
- valmistusvirheet;
- anturin ominaisvirhe;
- välykset tai muodonmuutokset anturin asennuspaikalla, jotka eivät vaikuta yleiseen suorituskykyyn;
- tarkkuuden riippuvuus lämpötilasta (käämilangan parametrit muuttuvat, mukaan lukien sen vastus).
Induktanssiantureiden kyvyttömyys reagoida dielektristen esineiden esiintymiseen niiden magneettikentässä voidaan katsoa sekä eduiksi että haittoiksi. Toisaalta tämä rajoittaa niiden soveltamisalaa. Toisaalta se tekee siitä epäherkän valvottavien kohteiden lian, rasvan, hiekan jne. esiintymiselle.
Induktiivisten antureiden toiminnan puutteiden ja mahdollisten rajoitusten tuntemus mahdollistaa niiden etujen järkevän käytön.
Induktiivisten antureiden laajuus
Induktiivisia läheisyysantureita käytetään usein rajakytkiminä. Tällaiset laitteet ovat yleistyneet:
- turvajärjestelmissä antureina ikkunoiden ja ovien luvatta avaamista varten;
- telemekaniikkajärjestelmissä yksiköiden ja mekanismien lopullisen sijainnin antureina;
- jokapäiväisessä elämässä ovien, ikkunaluukkujen suljetun asennon ilmoittamissuunnitelmissa;
- esineiden laskemiseen (esimerkiksi liikkumiseen kuljetinhihnaa pitkin);
- määrittää hammaspyörien pyörimisnopeus (jokainen hammas, joka kulkee anturin ohi, luo impulssin);
- muissa tilanteissa.

Kulmaantureilla voidaan määrittää akselien, hammaspyörien ja muiden pyörivien komponenttien kiertokulmat sekä absoluuttianturit. Tällaisia laitteita voidaan käyttää myös työstökoneissa ja robottilaitteissa lineaaristen asentoanturien ohella. Missä sinun on tiedettävä tarkalleen mekanismien solmujen sijainti.
Käytännön esimerkkejä induktiivisten antureiden toteutuksesta
Käytännössä induktiivisten antureiden rakenteet voidaan toteuttaa eri tavoin. Yksinkertaisin toteutus ja sisällyttäminen on kaksijohtimiselle yksianturille, joka valvoo metalliesineiden läsnäoloa herkkyysalueellaan. Tällaiset laitteet valmistetaan usein E-muotoisen ytimen pohjalta, mutta tämä ei ole olennainen asia. Tällainen toteutus on helpompi valmistaa.
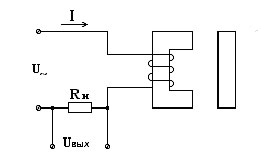
Kun käämin vastus muuttuu, virtapiirissä ja jännitehäviö kuorman yli muuttuvat. Nämä muutokset voidaan toteuttaa. Ongelmana on, että kuormituskestävyydestä tulee kriittinen. Jos se on liian suuri, virran muutokset metalliesineen ilmestyessä ovat suhteellisen pieniä. Tämä vähentää järjestelmän herkkyyttä ja melunsietokykyä. Jos se on pieni, virta piirissä on suuri, tarvitaan kestävämpi anturi.
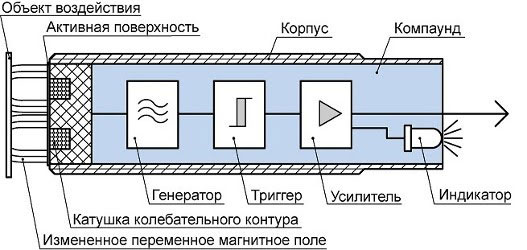
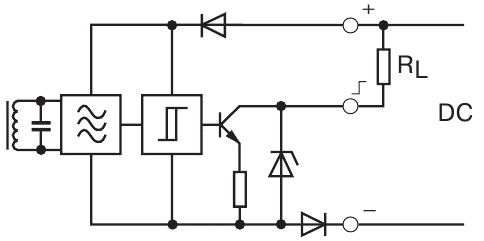
Siksi on olemassa malleja, joissa mittauspiiri on rakennettu anturin koteloon. Generaattori tuottaa pulsseja, jotka syöttävät kelan. Kun tietty taso saavutetaan, liipaisin laukeaa ja vaihtuu tilasta 0 1:ksi tai päinvastoin. Puskurivahvistin vahvistaa signaalia tehon ja (tai) jännitteen suhteen, sytyttää (sammuttaa) LEDin ja lähettää erillisen signaalin ulkoiseen piiriin.
Lähtösignaali voidaan muodostaa:
- sähkömagneettisesti tai puolijohderele – nolla tai yksi jännitetaso;
- "kuiva kontakti" sähkömagneettinen rele;
- avoin keräilijä transistori (rakenteet n-p-n tai p-n-p).
Tässä tapauksessa anturin kytkemiseen tarvitaan kolme johtoa:
- ruoka;
- yhteinen johto (0 volttia);
- signaalijohto.
Tällaisia antureita voidaan myös käyttää tasajännitteellä. Pulssit induktanssiin ne muodostetaan sisäisen generaattorin avulla.
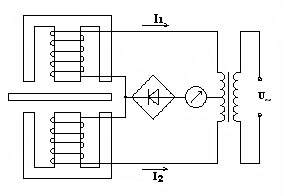
Differentiaaliantureita käytetään sijainnin valvontaan. Jos ohjattava kohde on symmetrinen molempien kelojen suhteen, virta niiden läpi on sama. Kun mitä tahansa käämiä siirretään kenttää kohti, syntyy epätasapaino, kokonaisvirta lakkaa olemasta nolla, mikä voidaan tallentaa osoittimella, jossa on nuoli asteikon keskellä. Ilmaisimen avulla voidaan määrittää sekä siirtymän suuruus että sen suunta. Osoitinlaitteen sijasta voit käyttää ohjausjärjestelmää, joka saatuaan tiedon sijainnin muutoksesta antaa signaalin, ryhtyy toimenpiteisiin kohteen kohdistamiseksi, tekee muutoksia teknologiseen prosessiin jne.

Lineaarisesti säädettävien differentiaalimuuntajien periaatteella valmistetut anturit valmistetaan kokonaisina rakenteina, jotka ovat runko, jossa on ensiö- ja toisiokäämit sekä sisällä liikkuva sauva (voi olla jousikuormitettu). Johdot tuodaan ulos signaalin lähettämiseksi generaattorista ja EMF:n poistamiseksi toisiokäämeistä. Ohjattu esine voidaan kiinnittää mekaanisesti sauvaan. Se voidaan valmistaa myös dielektristä - vain varren asento ratkaisee mittauksen.
Tietyistä luontaisista puutteista huolimatta induktiivinen anturi sulkee monia alueita, jotka liittyvät avaruudessa olevien esineiden kosketuksettomaan havaitsemiseen.Huolimatta tekniikan jatkuvasta kehityksestä tämäntyyppiset laitteet eivät lähitulevaisuudessa poistu mittalaitteiden markkinoilta, koska sen toiminta perustuu fysiikan peruslakeihin.
Samanlaisia artikkeleita: