Tiede sähkön alalla 1800- ja 1900-luvuilla kehittyi nopeasti, mikä johti sähköisten induktiomoottorien luomiseen. Tällaisten laitteiden avulla teollisuusteollisuuden kehitys on edennyt pitkälle, ja nyt on mahdotonta kuvitella tehtaita ja tehtaita ilman asynkronisia sähkömoottoreita käyttäviä voimakoneita.
Sisältö
Ulkonäön historia
Asynkronisen sähkömoottorin luomisen historia alkaa vuonna 1888, jolloin Nikola Tesla patentoi sähkömoottoripiirin, samana vuonna toinen sähkötekniikan alan tiedemies Gallileo Ferrarit julkaisi artikkelin asynkronisen koneen toiminnan teoreettisista näkökohdista.
Vuonna 1889 venäläinen fyysikko Mihail Osipovich Dolivo-Dobrovolsky sai patentin Saksassa asynkroniselle kolmivaiheiselle sähkömoottorille.

Kaikki nämä keksinnöt mahdollistivat sähkökoneiden parantamisen ja johtivat sähkökoneiden massiiviseen käyttöön teollisuudessa, mikä nopeutti merkittävästi kaikkia tuotannon teknologisia prosesseja, lisäsi työn tehokkuutta ja vähensi sen työvoiman intensiteettiä.
Tällä hetkellä yleisin teollisuudessa käytetty sähkömoottori on Dolivo-Dobrovolskyn luoma sähkökoneen prototyyppi.
Asynkronisen moottorin laite ja toimintaperiaate
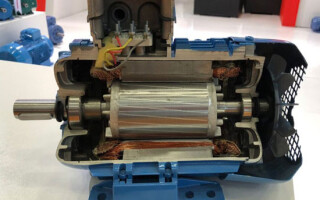
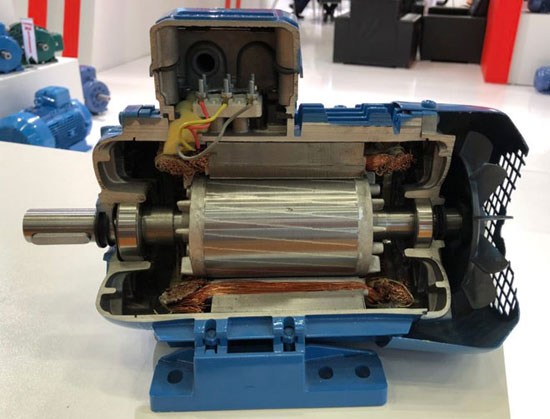
Induktiomoottorin pääkomponentit ovat staattori ja roottori, jotka on erotettu toisistaan ilmaraolla. Aktiivista työtä moottorissa suorittavat roottorin käämit ja ydin.
Moottorin asynkronisuus ymmärretään erona roottorin nopeuden ja sähkömagneettisen kentän pyörimistaajuuden välillä.
staattori - tämä on moottorin kiinteä osa, jonka ydin on valmistettu sähköteräksestä ja asennettu runkoon. Sänky on valettu materiaalista, joka ei ole magneettinen (valurautaa, alumiinia). Staattorin käämit ovat kolmivaiheinen järjestelmä, jossa johdot asetetaan uriin, joiden taipumakulma on 120 astetta. Käämien vaiheet on kytketty normaalisti verkkoon "tähti"- tai "kolmio"-kaavioiden mukaisesti.

Roottori Se on moottorin liikkuva osa. Asynkronisten sähkömoottoreiden roottoreita on kahta tyyppiä: oravahäkki- ja vaiheroottoreilla. Nämä tyypit eroavat toisistaan roottorin käämityksen rakenteissa.
Asynkroninen oravahäkkimoottori
Tämän tyyppisen sähkökoneen patentoi ensimmäisenä M.O. Dolivo-Dobrovolsky ja sitä kutsutaan kansan mukaan "oravan pyörä" rakenteen ulkonäön vuoksi. Oikosuljettu roottorin käämitys koostuu kuparitankoista, jotka on oikosuljettu renkailla (alumiinia, messinkiä) ja työnnetään roottorin sydämen käämin uriin. Tämän tyyppisissä roottoreissa ei ole liikkuvia koskettimia, joten nämä moottorit ovat erittäin luotettavia ja kestäviä.
Induktiomoottori vaiheroottorilla
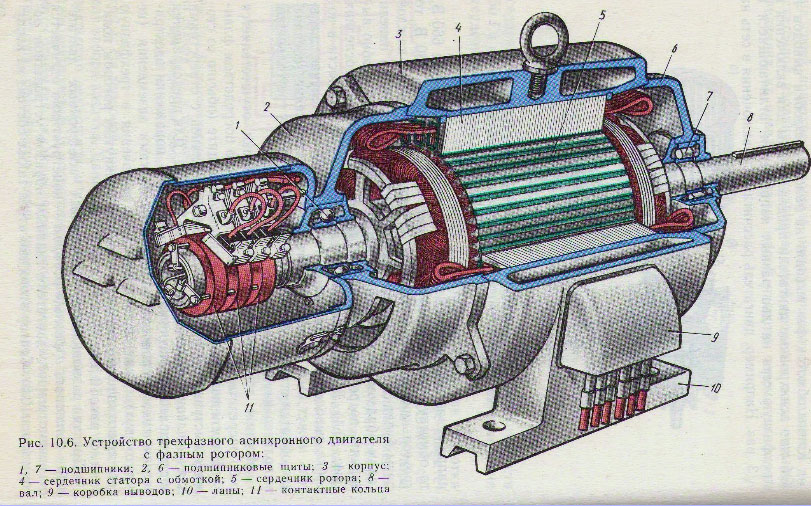
Tällaisen laitteen avulla voit säätää työn nopeutta laajalla alueella. Vaiherottori on kolmivaiheinen käämi, joka on kytketty "tähti"- tai kolmiokaavioiden mukaan. Tällaisissa sähkömoottoreissa on suunnittelussa erityisiä harjoja, joilla voit säätää roottorin nopeutta. Jos tällaisen moottorin mekanismiin lisätään erityinen reostaatti, niin moottoria käynnistettäessä aktiivinen vastus pienenee ja siten käynnistysvirrat pienenevät, mikä vaikuttaa haitallisesti sähköverkkoon ja itse laitteeseen.
Toimintaperiaate
Kun sähkövirta johdetaan staattorin käämiin, syntyy magneettivuo. Koska vaiheet ovat siirtyneet toisiinsa nähden 120 astetta, virtaus käämeissä pyörii tästä syystä. Jos roottori on oikosulussa, tällaisella pyörimisellä roottoriin ilmestyy virta, joka luo sähkömagneettisen kentän. Vuorovaikutuksessa keskenään roottorin ja staattorin magneettikentät saavat sähkömoottorin roottorin pyörimään. Jos roottori on vaihe, staattoriin ja roottoriin syötetään jännite samanaikaisesti, magneettikenttä ilmestyy jokaiseen mekanismiin, ne ovat vuorovaikutuksessa keskenään ja pyörittävät roottoria.
Asynkronisten moottoreiden edut
| oravahäkkiroottorilla | Vaiheroottorilla |
|---|---|
| 1. Yksinkertainen laite ja laukaisupiiri | 1. Pieni käynnistysvirta |
| 2. Alhaiset valmistuskustannukset | 2. Kyky säätää pyörimisnopeutta |
| 3. Kuorman kasvaessa akselin nopeus ei muutu | 3. Työskentele pienillä ylikuormituksilla muuttamatta nopeutta |
| 4. Kestää lyhytaikaisia ylikuormituksia | 4. Automaattinen käynnistys voidaan käyttää |
| 5. Luotettava ja kestävä käytössä | 5. Siinä on suuri vääntömomentti |
| 6. Sopii kaikkiin työolosuhteisiin | |
| 7. On korkea hyötysuhde |
Asynkronisten moottoreiden haitat
| oravahäkkiroottorilla | Vaiheroottorilla |
|---|---|
| 1. Roottorin nopeutta ei voi säätää | 1. Suuret mitat |
| 2. Pieni käynnistysmomentti | 2. Tehokkuus on alhaisempi |
| 3. Korkea käynnistysvirta | 3. Toistuva huolto harjan kulumisen vuoksi |
| 4. Suunnittelun monimutkaisuus ja liikkuvien koskettimien esiintyminen |
Asynkroniset moottorit ovat erittäin tehokkaita laitteita, joilla on erinomaiset mekaaniset ominaisuudet, mikä tekee niistä johtavia käyttötiheyden suhteen.
Toimintatilat

Asynkroninen sähkömoottori on universaali mekanismi ja sillä on useita toimintatiloja toiminnan keston ajan:
- Jatkuva;
- Lyhytaikainen;
- määräajoin;
- Toistuva-lyhytaikainen;
- Erityinen.
Jatkuva tila - asynkronisten laitteiden pääkäyttötapa, jolle on ominaista sähkömoottorin jatkuva toiminta ilman sammutuksia vakiokuormalla. Tämä toimintatapa on yleisin, sitä käytetään teollisuusyrityksissä kaikkialla.
hetkellinen tila - toimii kunnes vakiokuorma saavutetaan tietyn ajan (10-90 minuuttia), ei ehtinyt lämmitellä niin paljon kuin mahdollista. Sen jälkeen se sammuu. Tätä tilaa käytetään toimitettaessa työaineita (vesi, öljy, kaasu) ja muissa tilanteissa.
Jaksottainen tila - työn kestolla on tietty arvo ja se sammuu työjakson lopussa. Toimintatila start-work-stop. Samalla se voi sammua ajaksi, jonka aikana sillä ei ole aikaa jäähtyä ulkoisiin lämpötiloihin ja käynnistyä uudelleen.
Ajoittainen tila - moottori ei lämpene maksimiin, mutta sillä ei myöskään ole aikaa jäähtyä ulkolämpötilaan. Sitä käytetään hisseissä, liukuportaissa ja muissa laitteissa.
erityisjärjestelmä - sisällyttämisen kesto ja ajanjakso ovat mielivaltaisia.
Sähkötekniikassa on olemassa sähkökoneiden käännettävyyden periaate - tämä tarkoittaa, että laite voi sekä muuntaa sähköenergian mekaaniseksi energiaksi että suorittaa päinvastaisia toimia.
Asynkroniset sähkömoottorit vastaavat myös tätä periaatetta ja niillä on moottorin ja generaattorin toimintatapa.
Moottoritila - asynkronisen sähkömoottorin päätoimintatapa. Kun käämeihin syötetään jännite, syntyy sähkömagneettista vääntömomenttia, joka vetää roottoria akselin kanssa, ja siten akseli alkaa pyöriä, moottori saavuttaa vakionopeuden tehden hyödyllistä työtä.
generaattoritila - perustuu periaatteeseen sähkövirran herättämisestä moottorin käämeissä roottorin pyörimisen aikana. Jos moottorin roottoria pyöritetään mekaanisesti, staattorin käämeihin muodostuu sähkömotorinen voima, kun käämeissä on kondensaattori, syntyy kapasitiivinen virta.Jos kondensaattorin kapasitanssi on tietty arvo moottorin ominaisuuksista riippuen, generaattori aktivoituu itsestään ja kolmivaiheinen jännitejärjestelmä ilmestyy. Siten oravahäkkimoottori toimii generaattorina.
Asynkronisten moottoreiden nopeudensäätö
Asynkronisten sähkömoottoreiden pyörimisnopeuden säätämiseksi ja niiden toimintatilojen ohjaamiseksi on olemassa seuraavat menetelmät:
- Taajuus - kun sähköverkon virran taajuus muuttuu, sähkömoottorin pyörimistaajuus muuttuu. Tätä menetelmää varten käytetään taajuusmuuttajaksi kutsuttua laitetta;
- Reostaattinen - kun roottorin reostaatin vastus muuttuu, pyörimisnopeus muuttuu. Tämä menetelmä lisää käynnistysmomenttia ja kriittistä luistoa;
- Pulssi - ohjausmenetelmä, jossa moottoriin syötetään erityinen jännite.
- Käämien vaihtaminen sähkömoottorin käytön aikana "tähti"-piiristä "kolmio"-piiriin, mikä vähentää käynnistysvirtoja;
- Napaparin vaihdon ohjaus oravahäkkiroottoreille;
- Induktiivisen reaktanssin liitäntä moottoreille, joissa on kierretty roottori.
Elektronisten järjestelmien kehittymisen myötä erilaisten asynkronisten sähkömoottoreiden ohjaus tehostuu ja tarkentuu. Tällaisia moottoreita käytetään kaikkialla maailmassa, tällaisten mekanismien suorittamien tehtävien valikoima kasvaa joka päivä, eikä niiden tarve ole vähenemässä.
Samanlaisia artikkeleita: