Modulaatio on epälineaarinen sähköinen prosessi, jossa yhden signaalin (kantoaallon) parametreja muutetaan käyttämällä toista signaalia (modulointi, informaatio). Viestintätekniikassa taajuus-, amplitudi- ja vaihemodulaatiota käytetään laajalti. Tehoelektroniikassa ja mikroprosessoriteknologiassa pulssinleveysmodulaatio on yleistynyt.
Sisältö
Mikä on PWM (pulssin leveysmodulaatio)
Alkuperäisen signaalin pulssinleveysmodulaatiolla alkuperäisen signaalin amplitudi, taajuus ja vaihe pysyvät muuttumattomina. Suorakulmaisen pulssin kesto (leveys) voi muuttua informaatiosignaalin vaikutuksesta. Englanninkielisessä teknisessä kirjallisuudessa siitä käytetään lyhennettä PWM - pulse-width modulation.
Kuinka PWM toimii
Pulssinleveysmoduloitu signaali muodostetaan kahdella tavalla:
- analoginen;
- digitaalinen.
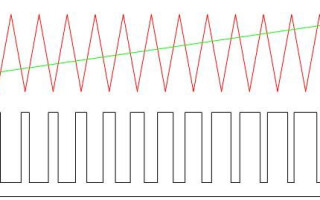
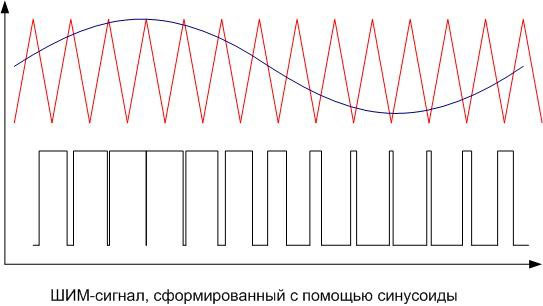
Analogisella menetelmällä PWM-signaalin luomiseksi kantoaalto saha- tai kolmiosignaalin muodossa syötetään invertoivaan vertailijan tulo, ja tiedot - ei-invertoinnista. Jos hetkellinen kantoaaltotaso on korkeampi kuin moduloiva signaali, niin vertailijan lähtö on nolla, jos pienempi - yksi. Lähtö on diskreetti signaali, jonka taajuus vastaa kantokolmion tai sahan taajuutta ja jonka pulssin pituus on verrannollinen moduloivan jännitteen tasoon.
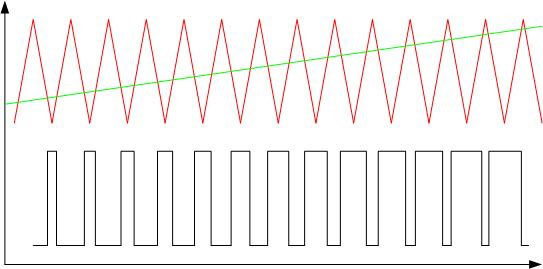
Esimerkiksi kolmiosignaalin pulssinleveysmodulaatio kasvaa lineaarisesti. Lähtöpulssien kesto on verrannollinen lähtösignaalin tasoon.
Analogisia PWM-ohjaimia on saatavana myös valmiina mikropiireinä, joiden sisään on asennettu komparaattori ja kantoaallon generointipiiri. Siellä on sisääntulot ulkoisten taajuudensäätöelementtien kytkemiseen ja informaatiosignaalin syöttämiseen. Lähdöstä poistetaan signaali, joka ohjaa tehokkaita vierasavaimia. Myös palautetuloja tarvitaan - niitä tarvitaan asetettujen ohjausparametrien ylläpitämiseen. Tällainen on esimerkiksi TL494-siru. Tapauksiin, joissa kuluttajan teho on suhteellisen pieni, saatavilla on sisäänrakennetuilla avaimilla varustettuja PWM-ohjaimia. LM2596-mikropiirin sisäinen avain on suunniteltu enintään 3 ampeerin virralle.
Digitaalinen menetelmä suoritetaan käyttämällä erityisiä mikropiirejä tai mikroprosessoreita. Pulssin pituutta ohjaa sisäinen ohjelma. Monissa mikro-ohjaimissa, mukaan lukien suositut PIC ja AVR, on sisäänrakennettu moduuli PWM:n laitteiston toteuttamiseen "aluksella", PWM-signaalin vastaanottamiseksi sinun on aktivoitava moduuli ja asetettava sen toimintaparametrit.Jos tällaista moduulia ei ole saatavilla, PWM voidaan järjestää puhtaasti ohjelmiston avulla, tämä ei ole vaikeaa. Tämä menetelmä antaa enemmän tehoa ja vapautta lähtöjen joustavan käytön ansiosta, mutta käyttää enemmän ohjainresursseja.
PWM-signaalin ominaisuudet
PWM-signaalin tärkeät ominaisuudet ovat:
- amplitudi (U);
- taajuus (f);
- Käyttömäärä (S) tai käyttösuhde D.
Amplitudi voltteina asetetaan kuorman mukaan. Sen on tarjottava kuluttajan nimellissyöttöjännite.
Pulssin leveydellä moduloidun signaalin taajuus valitaan seuraavista näkökohdista:
- Mitä suurempi taajuus, sitä suurempi ohjaustarkkuus.
- Taajuus ei saa olla pienempi kuin PWM-ohjatun laitteen vasteaika, muuten ohjatussa parametrissa esiintyy havaittavia aaltoiluja.
- Mitä suurempi taajuus, sitä suuremmat kytkentähäviöt. Se johtuu siitä, että avaimen kytkentäaika on rajallinen. Lukitussa tilassa kaikki syöttöjännite putoaa avainelementtiin, mutta virtaa ei juuri ole. Avoimessa tilassa täysi kuormavirta kulkee avaimen läpi, mutta jännitehäviö on pieni, koska läpimenovastus on muutama ohmi. Molemmissa tapauksissa tehohäviö on mitätön. Siirtyminen tilasta toiseen tapahtuu nopeasti, mutta ei hetkessä. Avaus-lukitusprosessissa suuri jännite putoaa osittain avoimeen elementtiin ja samalla merkittävä virta kulkee sen läpi. Tällä hetkellä hajautettu teho saavuttaa korkeat arvot. Tämä ajanjakso on lyhyt, avaimella ei ole aikaa lämmetä merkittävästi.Mutta kun tällaisten aikavälien tiheys aikayksikköä kohti lisääntyy, se lisääntyy ja lämpöhäviöt kasvavat. Siksi avainten rakentamisessa on tärkeää käyttää nopeita elementtejä.
- Ajettaessa sähkömoottori taajuus on otettava pois henkilön kuultavasta alueesta - 25 kHz ja yli. Koska pienemmällä PWM-taajuudella tapahtuu epämiellyttävä vihellys.
Nämä vaatimukset ovat usein ristiriidassa keskenään, joten taajuuden valinta on joissain tapauksissa kompromissi.
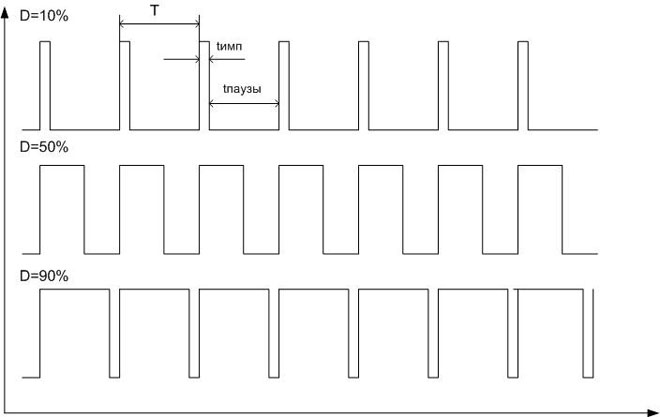
Modulaatioarvo luonnehtii käyttöjaksoa. Koska pulssin toistotaajuus on vakio, myös jakson kesto on vakio (T=1/f). Jakso koostuu impulssista ja tauosta, joiden kesto on vastaavasti timp ja Ttaukoja, ja Timp+ttaukoja=T. Käyttöjakso on pulssin keston suhde ajanjaksoon - S \u003d timp/T. Mutta käytännössä osoittautui helpommaksi käyttää käänteisarvoa - täyttökerrointa: D=1/S=T/timp. Vielä kätevämpää on ilmaista täyttökerroin prosentteina.
Mitä eroa on PWM:n ja SIR:n välillä
Ulkomaisessa teknisessä kirjallisuudessa pulssinleveysmodulaation ja pulssinleveyden säätelyn (PWR) välillä ei ole eroa. Venäläiset asiantuntijat yrittävät erottaa nämä käsitteet toisistaan. Itse asiassa PWM on eräänlainen modulaatio, toisin sanoen kantoaaltosignaalin muutokset toisen, moduloivan signaalin vaikutuksesta. Kantoaaltosignaali toimii tiedon kantajana, ja moduloiva signaali asettaa tämän tiedon. Ja pulssinleveyden säätö on kuormitustilan säätö PWM:n avulla.
PWM:n syyt ja sovellukset
Pulssinleveysmodulaation periaatetta käytetään voimakkaiden asynkronisten moottoreiden nopeudensäätimet. Tässä tapauksessa säädettävä taajuusmoduloiva signaali (yksivaiheinen tai kolmivaiheinen) muodostetaan pienitehoisella siniaaltogeneraattorilla ja asetetaan kantoaallon päälle analogisella tavalla. Lähtö on PWM-signaali, joka syötetään tarvittavan tehon näppäimiin. Sitten voit siirtää tuloksena olevan pulssisarjan alipäästösuodattimen läpi, esimerkiksi yksinkertaisen RC-piirin läpi, ja valita alkuperäisen sinioidin. Tai voit tehdä ilman sitä - suodatus tapahtuu luonnollisesti moottorin inertian vuoksi. Ilmeisesti mitä korkeampi kantoaaltotaajuus, sitä enemmän lähtöaaltomuoto on lähempänä alkuperäistä sinimuotoa.
Herää luonnollinen kysymys - miksi on mahdotonta vahvistaa generaattorin signaalia välittömästi, esimerkiksi käyttämällä tehokkaita transistoreita? Koska lineaarisessa tilassa toimiva säätöelementti jakaa tehon uudelleen kuorman ja avaimen välillä. Tässä tapauksessa merkittävää tehoa hukkaan avainelementtiin. Jos tehokas ohjauselementti toimii avaintilassa (trinistori, triac, RGBT-transistori), teho jakautuu ajan kuluessa. Tappiot ovat paljon pienemmät ja tehokkuus paljon suurempi.
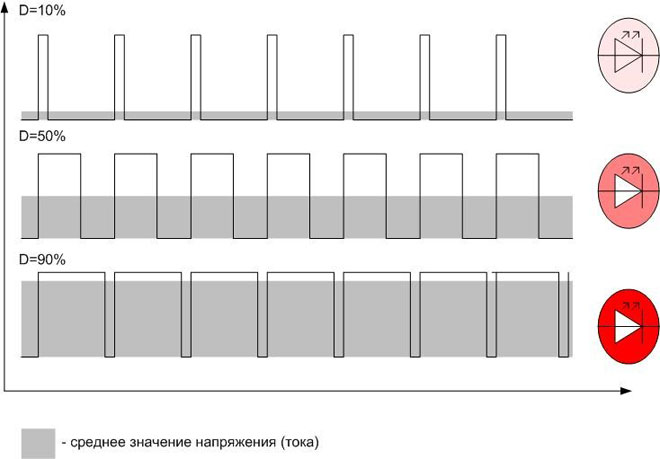
Digitaalisessa tekniikassa pulssinleveyden säätelylle ei ole erityistä vaihtoehtoa. Signaalin amplitudi on siellä vakio, jännitettä ja virtaa voidaan muuttaa vain moduloimalla kantoaaltoa pulssin leveydellä ja laskemalla sen jälkeen sen keskiarvo. Siksi PWM:ää käytetään säätämään jännitettä ja virtaa niissä kohteissa, jotka voivat keskiarvottaa pulssisignaalin. Keskiarvon laskeminen tapahtuu eri tavoin:
- kuormitushitauden vuoksi.Termosähköisten lämmittimien ja hehkulamppujen lämpöhitaus mahdollistaa siten, että säädetyt kohteet eivät jäähty merkittävästi pulssien välisissä tauoissa.
- Havaintohitauden takia. LEDillä on aikaa sammua pulssista toiseen, mutta ihmissilmä ei huomaa tätä ja havaitsee sen jatkuvana hehkuna, jonka voimakkuus vaihtelee. Tätä periaatetta käytetään LED-näyttöjen pisteiden kirkkauden säätelyyn. Mutta huomaamaton vilkkuminen useiden satojen hertsien taajuudella esiintyy edelleen ja aiheuttaa silmien väsymistä.
- mekaanisen inertian takia. Tätä ominaisuutta käytetään harjattujen tasavirtamoottoreiden ohjauksessa. Oikein valitulla säätötaajuudella moottorilla ei ole aikaa hidastua kuolleissa tauoissa.
Siksi PWM:ää käytetään silloin, kun jännitteen tai virran keskiarvolla on ratkaiseva rooli. Mainittujen yleisten tapausten lisäksi PWM-menetelmä säätelee keskimääräistä virtaa hitsauskoneissa ja akkulatureissa jne.
Jos luonnollinen keskiarvo ei ole mahdollista, monissa tapauksissa tämän roolin voi ottaa jo mainittu alipäästösuodatin (LPF) RC-ketjun muodossa. Käytännön tarkoituksiin tämä riittää, mutta on ymmärrettävä, että on mahdotonta eristää alkuperäistä signaalia PWM:stä käyttämällä alipäästösuodatinta ilman vääristymiä. Loppujen lopuksi PWM-spektri sisältää äärettömän määrän harmonisia, jotka väistämättä putoavat suodattimen päästökaistalle. Siksi ei pidä rakentaa illuusioita rekonstruoidun sinusoidin muodosta.
Erittäin tehokas ja tehokas PWM RGB LED -ohjaus. Tässä laitteessa on kolme p-n-liitosta - punainen, sininen, vihreä.Muutamalla erikseen kunkin kanavan hehkun kirkkautta, saat lähes minkä tahansa LED-valon värin (paitsi puhtaan valkoisen). Mahdollisuudet luoda valotehosteita PWM:llä ovat loputtomat.
Pulssinleveysmoduloidun digitaalisignaalin yleisin sovellus on ohjata kuorman läpi kulkevaa keskimääräistä virtaa tai jännitettä. Mutta myös tämäntyyppisen modulaation epätyypillinen käyttö on mahdollista. Kaikki riippuu kehittäjän mielikuvituksesta.
Samanlaisia artikkeleita: